

What Is a Rotation in Math? Guide to Turns, Degrees & Transformations
You are sitting at your desk during a geometry test. There is a triangle on a coordinate plane, and next to it, another triangle in a completely different position. The question asks: "Describe the transformation." You can tell the shape has moved -- but has it slid? Flipped? Turned? And if it turned, which way, and by how much?
Knowing what is a rotation in math -- and being able to apply rotation rules quickly and accurately -- is one of the most tested skills in middle and high school geometry. At HYE Tutors, we have worked with hundreds of students preparing for state geometry exams, Common Core assessments, and the SAT, and rotation comes up on nearly every paper. The students who score full marks on rotation questions have one thing in common: they know the rules, they know the direction convention, and they apply both carefully.
This guide covers everything you need: the definition, the three parts of every rotation, the coordinate rules for 90°, 180°, and 270°, step-by-step worked examples, and the exact mistakes to avoid. Let's get into it.
“A rotation is a type of transformation that turns a shape around a fixed point called the center of rotation. The shape moves a specific number of degrees — clockwise or counterclockwise — without changing its size or shape.
Three defining components: Center of rotation | Angle of rotation (degrees) | Direction (clockwise or counterclockwise)”
What Is a Rotation in Math?
In our experience teaching geometry at HYE Tutors, rotation is one of those topics where students lose marks not because they do not understand what a rotation is -- most students have an intuitive sense of spinning -- but because they mix up clockwise and counterclockwise, or apply the 90 degree rule when the question asks for 180 degrees. We are going to close both gaps right now, starting from the ground up.
Rotation in Math -- Definition
Imagine a clock face. The hands do not slide across the clock or flip over it -- they turn around the centre pin. That turning motion, measured in degrees around a fixed point, is exactly what rotation means in mathematics.
Formally: a rotation is a type of geometric transformation that turns every point of a shape a specified number of degrees around a fixed point, called the center of rotation. After the rotation, the shape is the same size and proportions as before -- it has simply changed position and orientation.
The shape before rotating is called the pre-image. The shape after rotating is called the image, and its vertices are labelled with prime notation: A becomes A', B becomes B', and so on.
Rotation is a rigid transformation -- meaning it preserves both size and shape. No stretching, no resizing, no flipping. Only turning. That property is what makes rotation different from dilation, and what links it to the other rigid transformations: translation and reflection.
Parts of a Rotation -- Center, Angle, and Direction
Every rotation in mathematics is defined by exactly three things. Miss any one of them and the rotation is incomplete. Here is how we explain each component in our tutoring sessions:
1. Center of rotation
The center of rotation is the fixed point around which every other point in the shape turns. On a coordinate plane, the center is most commonly the origin (0, 0), but it can be any point. Always check the question -- assuming the center is the origin when it is not is a reliable way to get the wrong answer.
2. Angle of rotation
The angle of rotation tells you how far the shape turns, measured in degrees. The angles tested most frequently on middle and high school exams are 90 degrees, 180 degrees, and 270 degrees. A 360 degree rotation brings the shape all the way back to its original position.
3. Direction of rotation
Direction is either clockwise (the same direction clock hands move) or counterclockwise (the opposite direction, sometimes called anti-clockwise outside the US). This distinction matters because the coordinate rules for 90 degrees clockwise and 90 degrees counterclockwise are different -- and mixing them up is the single most common rotation error we see in student work at HYE Tutors.
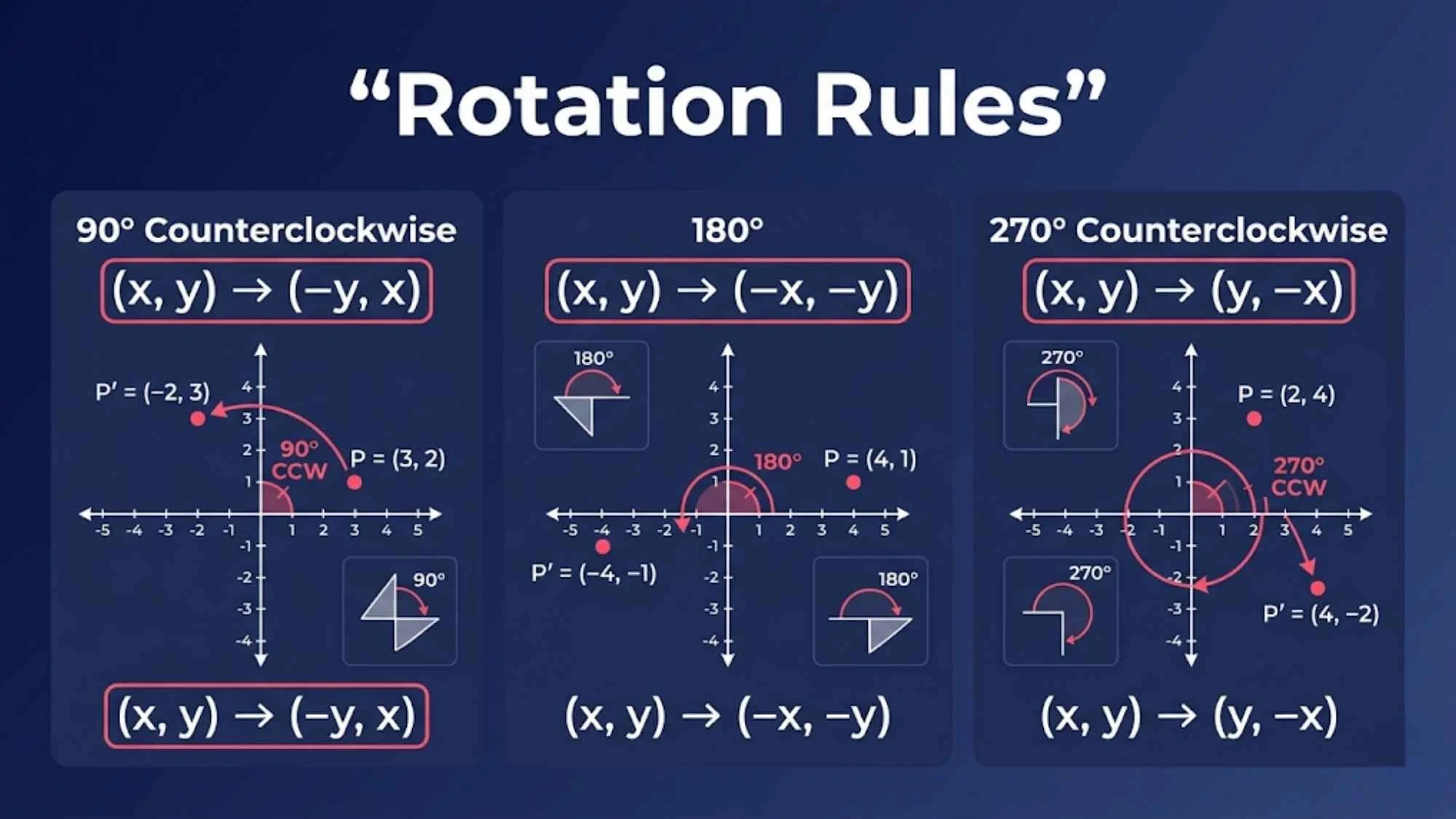
Rotation Rules in Math -- 90, 180, and 270 Degrees
These are the rules you need to have memorised cold before any geometry test. Every rule below assumes rotation counterclockwise around the origin unless otherwise stated.
| Rotation | Coordinate Rule | Example: (3, 4) | Quick Note |
|---|---|---|---|
| 90° counterclockwise | (x, y) → (−y, x) | (3, 4) → (−4, 3) | Most common |
| 180° | (x, y) → (−x, −y) | (3, 4) → (−3, −4) | Same CW/CCW |
| 270° counterclockwise | (x, y) → (y, −x) | (3, 4) → (4, −3) | = 90° clockwise |
| 90° clockwise | (x, y) → (y, −x) | (3, 4) → (4, −3) | = 270° CCW |
| 360° | (x, y) → (x, y) | (3, 4) → (3, 4) | Full turn |
The relationship to note: 90 degrees clockwise = 270 degrees counterclockwise, and vice versa. They produce the same output from the same input, just described differently. If a question says 90 degrees clockwise, you can either use the clockwise rule directly -- (x, y) to (y, -x) -- or convert it to 270 degrees counterclockwise and use that rule.
Step-by-step trace: rotating point P(3, 4) by 90 degrees counterclockwise
Rule: (x, y) → (-y, x)
Step 1: Identify x = 3, y = 4
Step 2: Apply rule -- new x = -y = -4, new y = x = 3
Result: P(3, 4) → P'(-4, 3)
Check: the point has moved one quarter turn counterclockwise around the origin.
How to Rotate a Shape on a Coordinate Plane -- Step-by-Step
Rotating a single point is one step. Rotating a full shape means applying the rule to every vertex -- which is where careless errors multiply. Here is the method we use in every HYE Tutors geometry session.
List all vertex coordinates of the shape.
Identify the three components: center of rotation, angle, and direction.
Apply the correct rotation rule to each vertex in turn.
Plot the new coordinates on the coordinate plane.
Connect the new points to draw the rotated image.
Label each new vertex with prime notation: A', B', C'.
Worked Example -- Triangle Rotated 90 Degrees Counterclockwise
Pre-image vertices: A(1, 2) B(3, 2) C(2, 4)
Rotation: 90 degrees counterclockwise around the origin
Rule: (x, y) → (-y, x)
A(1, 2): x = 1, y = 2 → new x = -2, new y = 1 → A'(-2, 1)
B(3, 2): x = 3, y = 2 → new x = -2, new y = 3 → B'(-2, 3)
C(2, 4): x = 2, y = 4 → new x = -4, new y = 2 → C'(-4, 2)
Image vertices: A'(-2, 1) B'(-2, 3) C'(-4,
"I always remind students: apply the rule to every single vertex -- not just the first one. Missing even one point means the shape will be wrong, and you lose marks on the entire problem. It is one of those careless errors that is completely preventable. Check each vertex off a list as you transform it."
One property worth noting: when you rotate a shape around the origin, every point stays the same distance from the origin -- only its angle changes. This connects directly to what we cover in our Pythagorean theorem guide, where distance on a coordinate plane is calculated using the same underlying geometry.
Rotation vs. Other Transformations -- Translation, Reflection, and Dilation
Rotation is one of four geometric transformations tested in every middle and high school geometry unit. Here is the comparison table we give students before any transformation exam:
| Transformation | What It Does | Changes Size? | Rigid? |
|---|---|---|---|
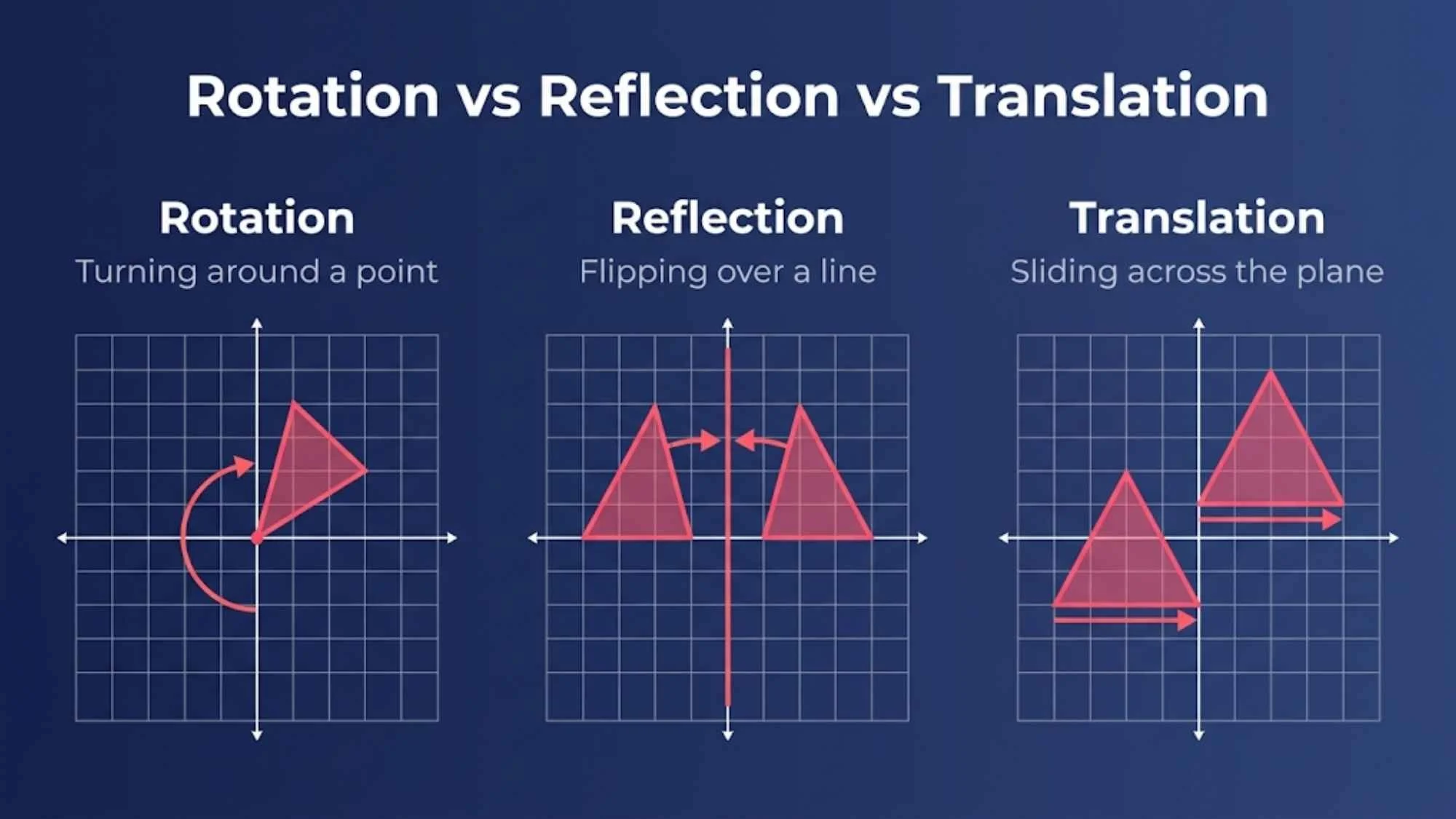
| Rotation | Turns around a fixed point | No | Yes |
| Translation | Slides in a direction | No | Yes |
| Reflection | Flips over a line | No | Yes |
| Dilation | Enlarges or shrinks | Yes | No |
The key distinction: rotation, translation, and reflection are all rigid transformations -- the shape that comes out is congruent (identical in size and shape) to the one that went in. Dilation is the only transformation that changes the size of a shape.
An excellent extended application of rotation and reflection combined is tessellations -- repeating patterns that tile a plane without gaps or overlaps. Understanding how shapes can be rotated and reflected repeatedly to fill a surface builds directly on the transformation rules in this guide.
Rotational Symmetry in Math
Once you understand rotation, rotational symmetry follows naturally. A shape has rotational symmetry if rotating it by less than 360 degrees produces an image that looks identical to the original. The number of times a shape looks the same during a full 360 degree rotation is called its order of rotational symmetry.
Square: order 4 -- looks identical at 90, 180, 270, and 360 degrees.
Equilateral triangle: order 3 -- looks identical at 120, 240, and 360 degrees.
Regular hexagon: order 6 -- looks identical every 60 degrees.
Circle: infinite rotational symmetry -- looks identical at any angle of rotation.
Rectangle (non-square): order 2 -- looks identical at 180 and 360 degrees only.
Rotational symmetry questions appear regularly on standardised tests and in geometry units. They look complicated at first glance -- but once you understand the concept of order, most of them take under 30 seconds. The formula to find the angle between identical positions is simply 360 / order. For a hexagon: 360 / 6 = 60 degrees.
"Rotational symmetry questions are a favourite on state geometry papers precisely because students who have not studied them carefully think they are harder than they are. Once you know the word order and can divide 360, these questions become some of the fastest on the entire exam."
Rotation in Math -- Practice Problems
Rules memorised on paper are different from rules applied under exam pressure. These problems progress from basic coordinate rotation to the kind of applied question that appears on standardised tests. Work through every one.
Problem 1 -- Basic 180 Degree Rotation
Rotate point P(2, 5) by 180 degrees around the origin.
Rule: (x, y) -> (-x, -y)
Working: x = 2, y = 5 -> new x = -2, new y = -5
Answer: P'(-2, -5)
Problem 2 -- 90 Degrees Counterclockwise
Rotate point Q(-3, 4) by 90 degrees counterclockwise around the origin.
Rule: (x, y) -> (-y, x)
Working: x = -3, y = 4 -> new x = -4, new y = -3
Answer: Q'(-4, -3)Note: x was negative to start -- be careful with signs when applying the rule.
Problem 3 -- Shape Rotation (270 Degrees Counterclockwise)
Rotate triangle with vertices A(1,1), B(4,1), C(4,3) by 270 degrees counterclockwise.
Rule: (x, y) -> (y, -x)
A(1,1): new x = 1, new y = -1 -> A'(1, -1)
B(4,1): new x = 1, new y = -4 -> B'(1, -4)
C(4,3): new x = 3, new y = -4 -> C'(3, -4)
Problem 4 -- Rotational Symmetry
What is the order of rotational symmetry of a regular hexagon?
Reasoning: A regular hexagon has 6 equal sides and 6 equal angles.It looks identical every 360/6 = 60 degrees.It returns to its original appearance 6 times in a full 360 degree rotation.
Answer: Order 6 | Angle of symmetry = 60 degrees
Problem 5 -- Word Problem (Clock)
A clock hand starts at the 12 o'clock position. It rotates 90 degrees clockwise. Where does it point
Reasoning: The clock face represents a full 360 degree circle.Starting at 12 (the top), a 90 degree clockwise rotation is one quarter turn.One quarter of the clock face clockwise from 12 is the 3 o'clock position.
Answer: 3 o'clock
Word problems like the clock question appear every year on standardised geometry exams. The key skill is translating the scenario into degrees and direction before you touch any coordinates. A 90 degree clockwise rotation is a quarter turn to the right. A 180 degree rotation is a half turn. Once you can see the rotation in your head, the calculation follows naturally.
Want to work through rotation problems one-on-one with a tutor?
Our team at HYE Tutors will find exactly where you are dropping marks on transformation questions and fix it problem by problem.
Book a free session todayCommon Mistakes Students Make with Rotation in Math
These are the errors we correct in student work at HYE Tutors on a weekly basis. Every single one of them is preventable once you know to watch for it.
Mistake 1: Mixing up clockwise and counterclockwiseThe single most common rotation error we see. A student reads the question, skips over the direction word, and applies the wrong rule. Fix: Circle the direction word -- clockwise or counterclockwise -- before writing anything. Make it a non-negotiable first step.
Mistake 2: Applying the wrong ruleUsing the 90 degree rule for a 180 degree rotation, or vice versa. These produce completely different outputs: (3,4) under 90 CCW becomes (-4,3); under 180 it becomes (-3,-4). Fix: Keep the rules table visible while practising until all three are fully automatic. Write the rule down before applying it.
Mistake 3: Transforming only some verticesRotating two out of three points in a triangle and drawing a shape that is not actually the correct image. Fix: Number each vertex as you list them. Cross each one off after transforming it. Do not move on until every vertex has a prime.
Mistake 4: Assuming the center is always the originThe standard rules only apply when rotating around (0,0). If the question specifies a different center, the approach changes. Fix: Read the center of rotation in every question before selecting a rule. Underline it. If it is not the origin, use a translation approach or adjust your method accordingly.
Mistake 5: Confusing rotation with reflectionA rotation turns a shape around a point. A reflection flips it over a line. In a reflected image, the orientation reverses (like a mirror). In a rotated image, the orientation is preserved -- just spun. Fix: If the image looks like a mirror copy, it is a reflection. If it looks like the same shape turned, it is a rotation.
Mistake 6: Missing prime notationLabelling the rotated vertices as A, B, C instead of A', B', C'. This costs marks on formal assessments and creates confusion when both the pre-image and image are drawn on the same plane. Fix: Prime notation is mandatory on any labelled diagram. Build it into your final step.
Before You Solve -- Quick Checklist
Identified the center of rotation?
Noted the angle (90, 180, 270)?
Circled the direction (clockwise or counterclockwise)?
Selected the correct rule from the table?
Transformed every vertex -- not just the first?
Labelled all image vertices with prime notation?
FAQs
What is a rotation in math in simple terms?
A rotation in math is when a shape turns around a fixed point without changing its size or shape. Think of a clock hand rotating around the centre pin -- the hand stays the same length, but its position changes depending on how far it has turned.
What are the types of rotation in math?
Rotations are categorised by their angle: 90 degrees (quarter turn), 180 degrees (half turn), 270 degrees (three-quarter turn), and 360 degrees (full turn, back to start). Each angle can go clockwise or counterclockwise, giving six distinct rotation types in total.
What is the rule for rotation in math?
The three core rules, all assuming counterclockwise rotation around the origin:
90 CCW: (x, y) → (-y, x)
180: (x, y) → (-x, -y)
270 CCW (= 90 CW): (x, y) → (y, -x)
What is the difference between rotation and reflection in math?
Rotation turns a shape around a fixed point -- the orientation is preserved (like spinning a piece of paper). Reflection flips a shape over a line -- the orientation reverses (like a mirror image). Both are rigid transformations that preserve size and shape, but they produce different results.
What does a 90 degree rotation look like?
A 90 degree rotation is a quarter turn. Using the clock analogy: if you start at 12 o'clock and rotate 90 degrees clockwise, you end up at 3 o'clock. On a coordinate plane, the point (3, 4) rotated 90 degrees counterclockwise becomes (-4, 3) -- a quarter turn to the left around the origin.
Is rotation the same as revolution?
No. Rotation means spinning around an internal axis (Earth spinning on its own axis). Revolution means orbiting around an external point or body (Earth orbiting the Sun). In geometry, rotation always refers to the transformation covered in this guide -- turning a shape around a fixed center point. According to Math is Fun's geometry section, the distinction is important in both mathematics and physical science.
Conclusion
Rotation is one of the most testable and visually satisfying topics in all of middle and high school geometry -- and now you have the complete toolkit. Every rotation is defined by three things: a center of rotation, an angle, and a direction. Master those three components and the rest follows.
Keep the three core rules within reach until they are fully automatic: 90 degrees counterclockwise gives (-y, x); 180 degrees gives (-x, -y); 270 degrees counterclockwise gives (y, -x). And always circle the direction word before you pick a rule -- that single habit eliminates the most common rotation error on any exam.
Understanding what is a rotation in math is the foundation for a cluster of related geometry topics: transformations, tessellations, symmetry, and coordinate geometry all build on the same core concept. The more fluent you become with rotation, the faster every connected topic becomes. Our guides on tessellations and the Pythagorean theorem are the natural next steps from here.
Ready to practise rotation with an expert geometry tutor?
At HYE Tutors, we work through transformation problems one-on-one -- finding the exact step where each student is losing marks and building the confidence to get them right every time.
Book a free session todayKeep Reading - Related Guides from HYE Tutors
What Is a Tessellation in Math? -- rotation and reflection applied to repeating patterns
What Is the Pythagorean Theorem? -- coordinate geometry and distance, the foundation under rotation
What Is Volume in Math? -- another core geometry topic tested alongside transformations
What Is Mean, Median, Mode and Range in Math? -- the data side of middle school math, tested in the same units